Das Problem
In der Vergangenheit habe ich schon etwa 10 Faller-Car Fahrzeuge für die Eisenbahnfreunde Bietigheim-Bissingen e.V. mit DC-Car Decodern ausgerüstet bzw. umgebaut. Meistens kommen NiMh-Akkus zum Einsatz, wenn genug Platz zur Verfügung steht – ist dies einmal nicht der Fall, verwenden wir LiPo-Akkus.
LiPo-Akkus haben zwar den Vorteil weniger Platz zu verbrauchen, sind dafür aber auch anfälliger bzw. sehr empfindlich für Tiefentladung, Überladung, Kurzschlüsse usw. und können daher auch ganz schön gefährlich sein. Nichts desto trotz geht es manchmal nicht ohne, also muss man gewisse Kompromisse eingehen. Einer dieser Kompromisse betrifft direkt den Antrieb der Fahrzeuge: nämlich den Motor selbst.
Wir verwenden seit geraum Zeit ausschließlich die Getriebe, die direkt vom DC-Car Erfinder Claus Ilchmann vertrieben werden, da wir damit sehr gute Erfahrungen gemacht haben. Die verbauten Motoren sind jedoch für Spannungen um die 2,5 Volt ausgelegt, aber nicht für die fast 4 Volt eines vollen LiPo-Akkus. Damit Fahrzeuge Aufgrund des Spannungsunterschieds nicht zu schnell Fahren, verbaut man für gewöhnlich Dioden in Reihe zum Motor, um die Spannung herabzusetzen (an jeder Diode fallen je nach Typ etwa 0,5 bis 0,7 Volt ab) – alternativ werden auch kleine Widerstände (30 Ohm) in Reihe verwendet.
Diese Lösungen gefielen mir noch nie wirklich, denn sie sind von der Spannung des Akku abhängig und sind auch nicht wirklich flexibel. Entweder der Motor hat kaum mehr Drehmoment (beim Widerstand) oder die Spannungsunterschiede der Dioden sind zu groß für eine optimale Einstellung.
Die Lösung
Was liegt bei einem solchen Problem am nächsten, als einen simplen und einstellbaren Spannungsregler zu verwenden?
Gesagt, getan: Nach etwas Recherche habe ich einen einstellbaren LDO (TPS73601) mit 400mA Belastbarkeit auf der Webseite von Texas Instruments ausfindig gemacht und gleich ein paar Samples davon bestellt. Preispunkt pro Regler: gerade einmal 2 Euro. Fehlte nur noch ein kleiner SMD-Poti mit 100K, welcher über eBay geordert wurde.
Nach einem kleinen fliegenden Testaufbau, welcher einwandfrei funktioniert hatte, machte ich mich daran eine kleine Platine aufzubauen.Das Resultat, sowie die dafür nötigen Umbauten an einem Fahrzeug sind im Folgenden aufgeführt.
Die Vorteile liegen auf der Hand:
- frei einstellbare Ausgangsspannung für den Motor unabhängig vom Rest des Decoders bzw. anderer Komponenten (Spannung von ca. 0 Volt bis fast hin zur Eingangsspannung des Akku)
- kompakte Größe der Platine: gerade einmal 7,5×7,5mm
- Eingangsspannung von 1,7 bis 5,5 Volt (gut für LiPo-Akku, aber nur bedingt für NiMH-Akkus geeignet)
- keine Abhängigkeit von der Akkuspannung mehr
- bis der Motor ausfällt bzw. der Regler nicht mehr seine Ausgangsspannung liefert hat sich der Decoder bereits schon verabschiedet durch die Brownout Detection
- sinkt die Akkuspannung, regelt der LDO automatisch nach und hält die Ausgangsspannung
- volles Drehmoment für den Motor
- der maximale Strom von 400mA sollte ausreichend sein (in meinen Tests gab der Regler erst auf, wenn ich den Motor händisch mit viel Kraft versucht habe zu stoppen – in der Realität sollte es nie soweit kommen)
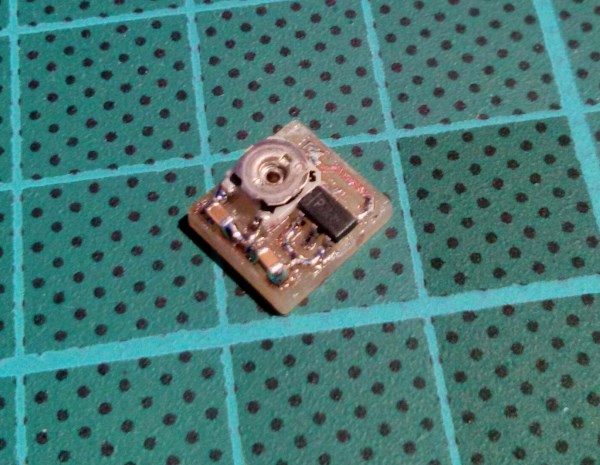
Die bestückte Platine fertig zum Einbau
Eine kleine Anmerkung noch:
Den LDO kann man laut Datenblatt eigentlich auch ohne Kondensatoren betreiben d.h. bei engen Platzverhältnissen können diese auch weggelassen werden. Für bessere Regeleigenschaften habe ich diese aber in meinem Design berücksichtigt, damit die Spannung für den Decoder nicht zu sehr negativ beeinflusst wird.
Schaltplan, Layout und Einbau
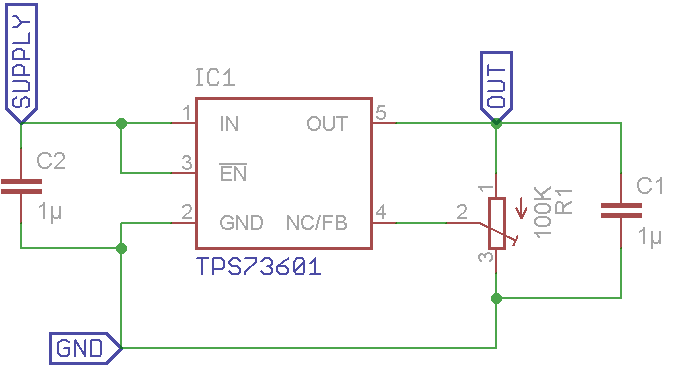
Schaltplan des LiPo-Reglers mit dem TPS73601 von Texas Instruments
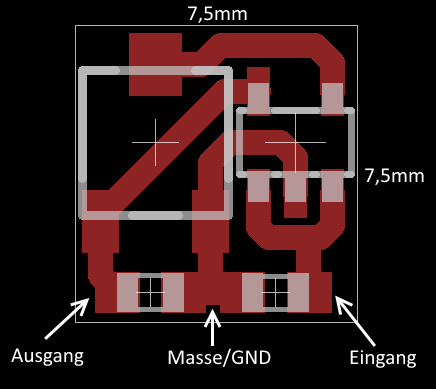
Platinenlayout mit Beschreibung der Anschlüsse
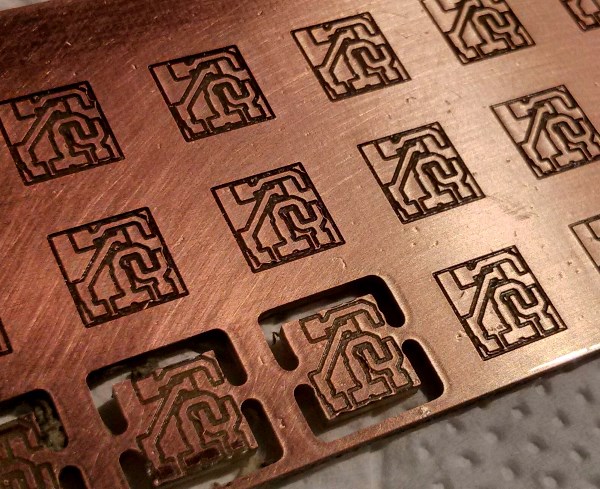
Eigens gefräste Platinen für den Aufbau – Vorrat kann nie schaden 😉
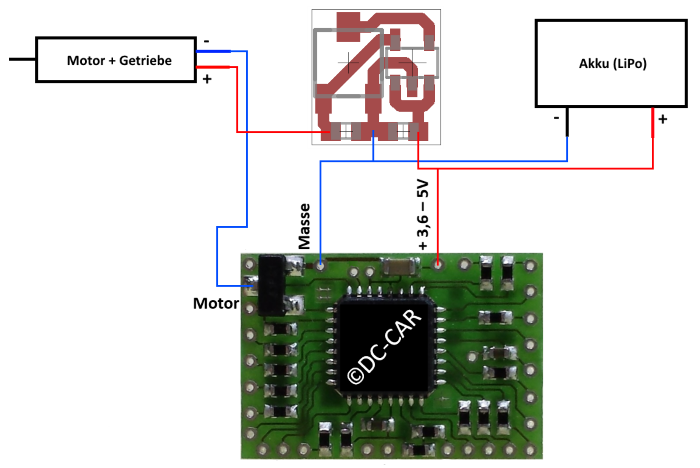
Nötige Umbauten im Fahrzeug. Schutzdioden sowie Schalter müssen natürlich nachwievor verbaut werden! (Bild: doug, DC-Car Wiki)