Faller Car Weiche
Konzepte und Aufbauten für Faller-Car bzw. DC-Car Weichen gibt es bereits zu genüge im Netz zu finden. Hierzu zählen die offiziellen Antriebe von Faller als auch diverse Eigenbauten die man hier und da findet. Zwei Ansätze, die von Herr Ilchmann direkt vorgestellt werden, haben uns dazu angeregt weiter zu forschen. Generell werden hier nur solche verfolgt, die Servo-basiert sind. Dies ist schlichtweg eine Vorliebe sowie fundiert auf Wissen aus anderen z.B. magnetisch aufgebauten Systemen.
Probleme

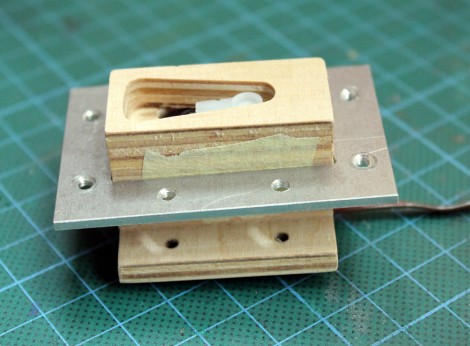
Claus Ilchmann Aufbau
Primär ist für uns der Servoantrieb interessant, da wir hiermit bereits viele positive Erfahrungen sammeln konnten. Der Ansatz, den Herr Ilchmann hier für Servos vorschlägt hat jedoch einige Nachteile:
- Wie wechselt man den Servo aus, wenn dieser im eingebauten Zustand kaputt geht?
- Das Fahrverhalten der Fahrzeuge wirkt sehr ruckartig beim Abbiegen, da der Draht vollständig gedreht, aber nicht im Kurvenradius gebogen/verformt wird.
- Aufbau wirkt unschön bzw. instabil.
Zielsetzung
Diese Nachteile sollen durch ein solideres Konzept aufgehoben und ausgemerzt werden. Dieses umfasst die folgenden Kriterien:
- Wechsel der Servos im eingebauten Zustand ist möglich ohne die Fahrbahn zu beschädigen
- Verschiedene Servo-Stellungen sollen möglich sein. Mindestens jedoch drei.
- Einfacher Einbau an beliebiger Stelle mit minimalen Platzaufwand.
- Einfache Befestigung an beliebig dicken Anlagen- und Fahrbahndecken
- Geschmeidiges Fahrverhalten beim Abbiegen, d.h. keine abrupten Fahrmanöver
Auf die Bilder klicken für weitere Details!
Version 1
|
Version 2
|
Version 3
|