Schon seit geraumer Zeit war klar, dass die bereits seit fast 20 Jahren bestehende Faller-Car Strecke in der HP-Spinne einer Überarbeitung bedurfte. Im Jahr 2013 wurde dann der Entschluss gefasst diese komplett umzukrempeln – inklusive DC-Car Aufzug selbstverständlich. Hierzu wurde dieser weiter entwickelt, auf- und eingebaut.
Veränderungen zur Vorversion
Aus den Fehlern und Erkenntnissen der Aufzug Vorversionen wurde ein neuer Plan für die Version 3 erarbeitet. Eine Liste der Veränderungen:
- Linearführung nicht mehr mit alten Teilen aus Druckern, sondern professionelle aus der Industrie von der Firma Igus. Diese sind wartungsfrei und günstig in der Beschaffung. Die Führung sollte parallel erfolgen, um Wackeleien zu vermeiden.
- Verwendung von klassischen Endschaltern, anstatt diese aus Relais auszubauen. Diese sind korrosionsfrei, sodass die Kontakt immer schalten und nicht separat gereinigt werden müssen.
- Aufbau mit Multiplex Holzplatten mit einem modularen System. Der Aufzug soll zur Wartung ausgebaut werden können.
- Der Riemenantrieb soll mit Schrauben gespannt und justiert werden können.
- Die Absturzsicherung an der Ein- und Ausfahrt soll mit RC-Modellbau-Servo umgesetzt werden, da diese zuverlässiger funktionieren im Vergleich zu einer mechanisch fraglichen Konstruktion der Vorversion des Aufzug.
- Verwendung von Magnetband, damit die Fahrzeuge auf keinen Fall die Spur im Aufzug verlieren können.
- Neukonstruktion der Steuerung mit Atmel Mikrocontroller und speziellen Fokus auf den Betrieb in beide Fahrrichtungen (oben-nach-unten und unten-nach-oben) sowie optionale Verwendung von klassischen Magnetspulen zum Fahrzeug-Stop.
Demo-Video
[youtube url=“http://www.youtube.com/watch?v=v37HGCpeZCs“]Features der Software und Steuer-Elektronik
- Software wurde komplett in C als State-Machine geschrieben.
- Eigens geschriebener Scheduler ist für zeitliche Ablaufsteuerung verantwortlich. Scheduler-Tick wird alle 5ms ausgelöst.
- Beim Einschalten des Aufzug werden erst die aktuellen Schalter geprüft und dann der Aufzug in die untere Stellung gefahren – quasi als Initialisierungsvorgang. Man kann ja schlecht erraten wo der Aufzug steht wenn er Wochen nicht in Betrieb war.
- Bei mehrfachem Auslösen eines Sensors wird Nothalt ausgelöst: Soll Schäden am Aufzug und Fahrzeugen verhindern. Manueller Hardware-Reset ist dann nötig.
- Steuerung kann noch massiv ausgebaut werden – ausreichend Speicher steht zur Verfügung. Evtl. Programmierung über die beiden nicht genutzten Taster.
- Elektronik ist für klassische Magnet-Stopp-Spulen gerüstet. Relais können aber auch anderweitig genutzt werden.
- Aufbau erlaubt Betrieb in beide Richtungen (oben-nach-unten, unten-nach-oben), wenn zwei Magnetbänder nebeneinander verwendet werden (ohne Weichen).
- Rückmeldung des Status über drei LED (normalerweise blinkt eine LED im 500ms Raster, eine zweite blinkt im Abtastraster der Sensoren). Blinken alle gleichzeitig und im gleichen Takt wurde Nothalt ausgelöst.
- Geschwindigkeitssteuerung des Antriebsmotor via Phase-Correct-PWM.
- Servo-Ansteuerung über PWM (muss einmalig, leider recht aufwändig, justiert werden).
- Endlagen- und Positionsschalter werden im 10ms Raster geprüft und entprellt.
- Hall-Sensoren haben bereits ein sauberes und entprelltes Ausgangssignal. Da hierauf schnell reagiert werden muss werden hier Pin-Change Interrupts verwendet.
- Eigens implementierte DCC-Senderoutine zur Ausgabe der DCC-Signale (dynamisch für beliebige Ports und Pins und beliebige Anzahl verschiedener auszugebender Signale)
Bilder vom Bau
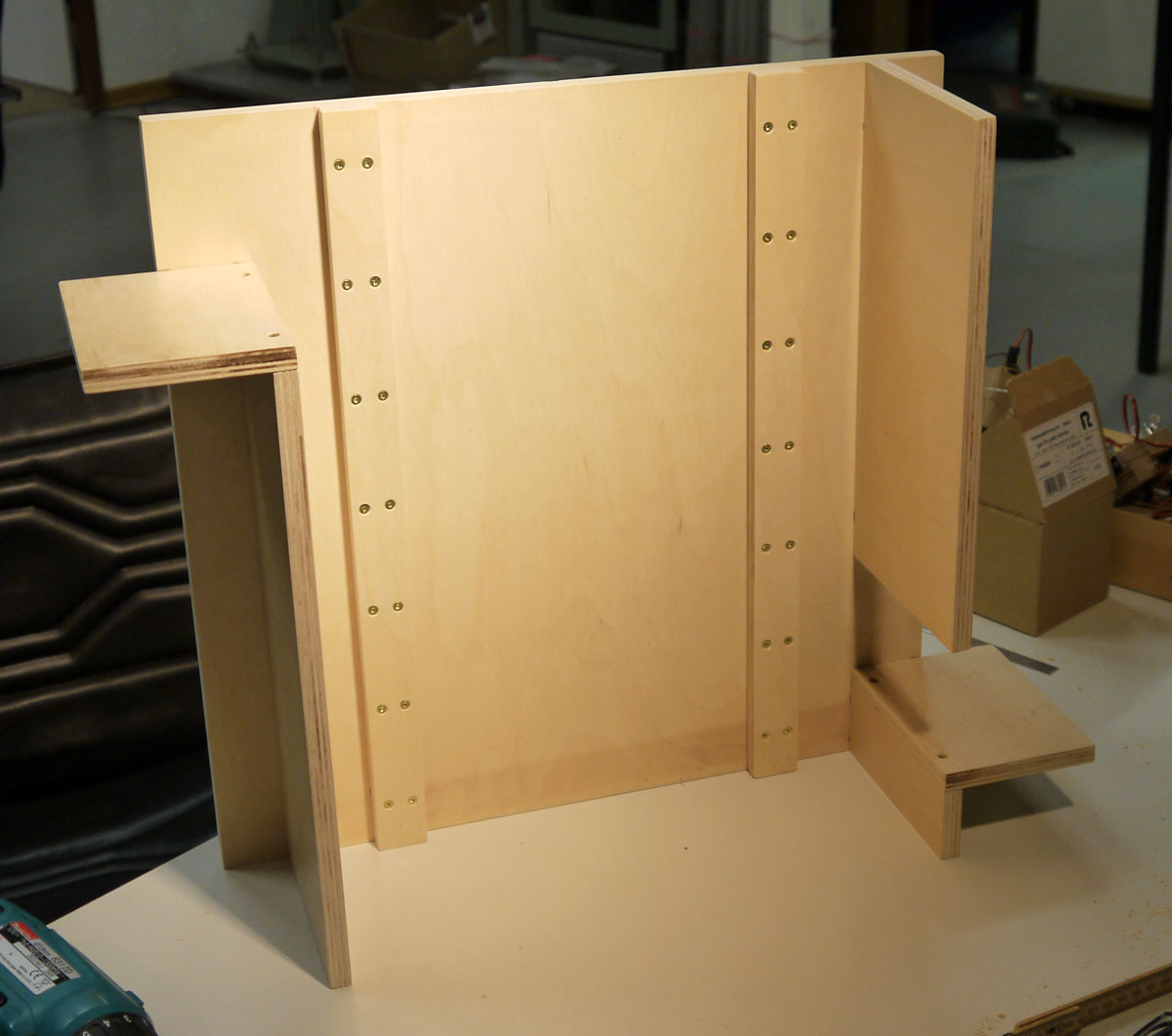
In diesem Bild kann man sehr schön das neu verwendete Magnetband erkennen. Die Nut hierfür wurde direkt beim Zusägen der Bretter mit der Kreissäge erledigt.
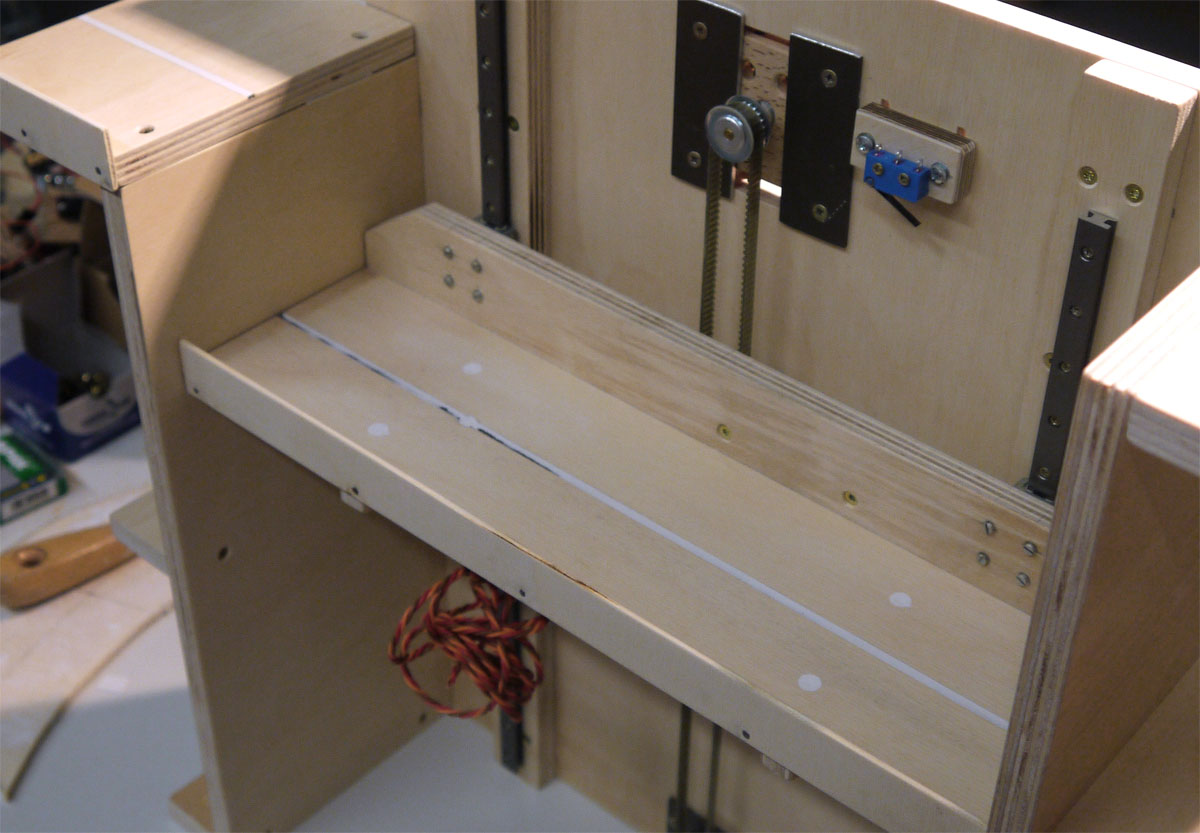
Die Kabel markieren die Stellen wo die Fahrzeugposition an die Steuerung zurück gemeldet wird:
- Am Eingang damit das Stop-Signal für folgende Fahrzeuge aktiviert/ausgesendet werden kann
- Auf dem Aufzug damit das Stop-Signal für einfahrende Fahrzeuge gesendet werden kann und der Aufzug seine Bewegung startet
Erster Bewegungstest mit den neu eingebauten Linearführungen. Die Kraft, mit welcher die Schrauben der Schlitten angezogen werden ist entscheidend über eine leichtgängige Bewegung – verkannten sollte es nicht.
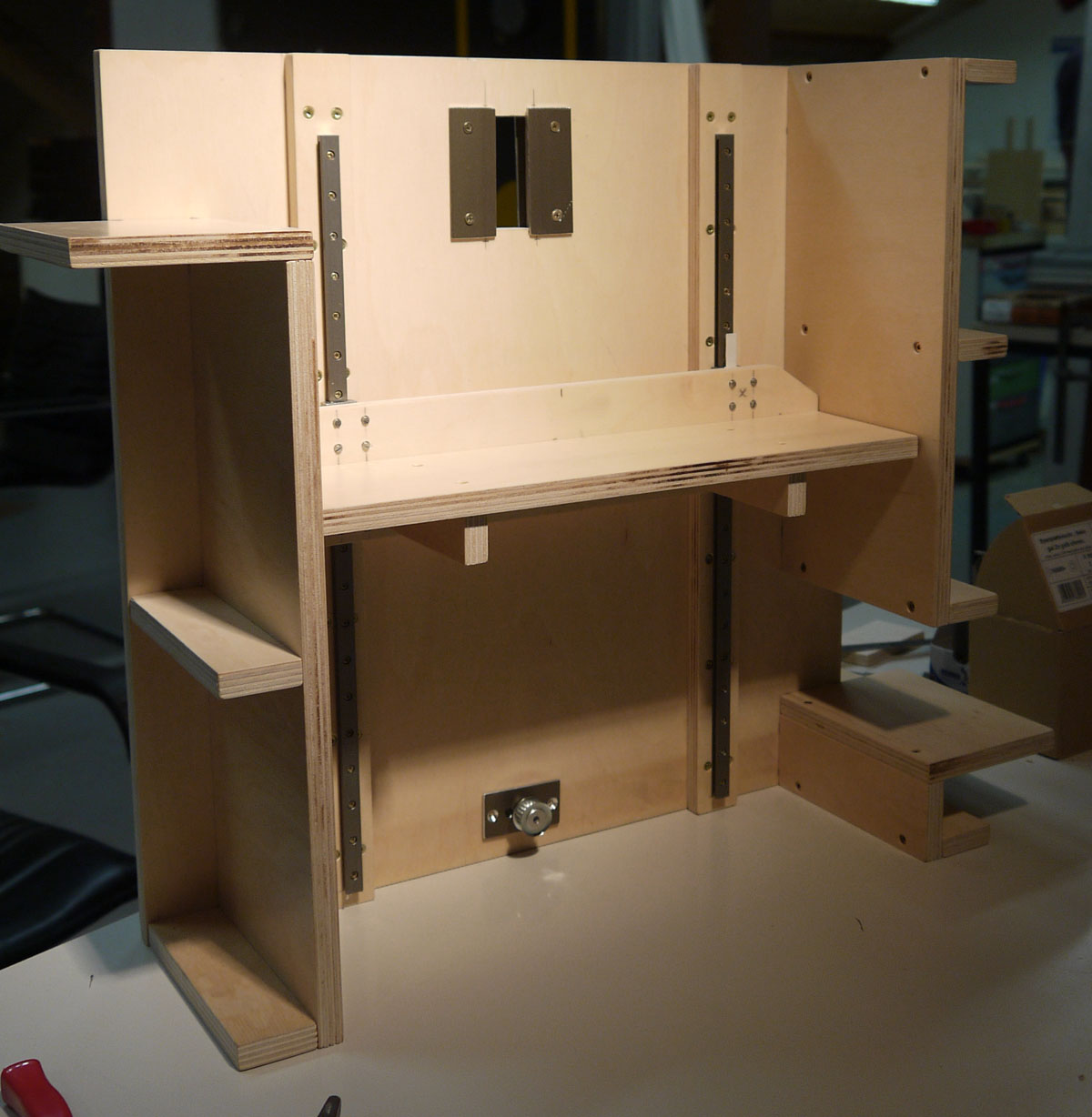
Erste Stellprobe des beweglichen Aufzugteil samt Linearführung. Die Schrauben werden im Anschluss nach genauer Ausrichtung eingeschraubt, damit die Führung nicht klemmt und parallel läuft. Das Multiplex-Holz verzieht sich kaum aufgrund von Temperaturänderungen – ideal für den Aufzug, welcher auch in vielen Jahren noch funktionieren muss.

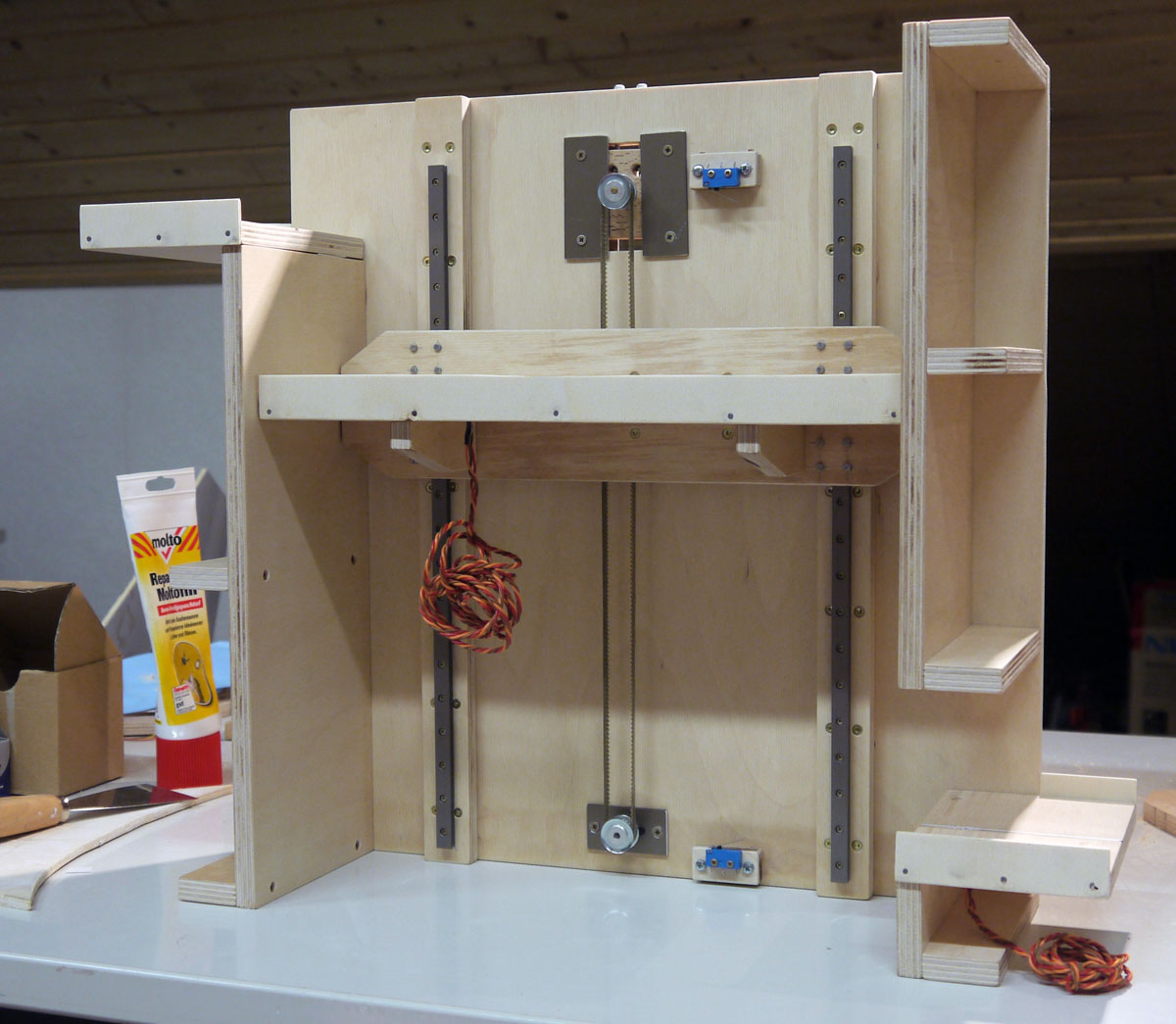
Der Grundrahmen aus Multiplex-Holz entstand basierend auf den zuvor gebauten Aufzugversionen in einem ähnlichen Prinzip. Lediglich die zu überwindende Höhe wurde angepasst auf genau 31cm.
Beschreibung der Komponenten:
- Hall-Senor zur Rückmeldung der Information: Fahrzeug ist sicher und vollständig aus dem Aufzug heraus gefahren. Erst wenn dieses Signal ausgelöst wird schließt der obere Servo die Ausfahrt und der Aufzug fährt wieder nach unten.
- RC-Modellbau-Servo als Ausfahrtschranke und Absturzsicherung. Geht im Ablauf automatisch auf und zu.
- Kabelschlepp-System zur Führung der Kabel auf dem beweglichen Teil des Aufzug. Hier zwei Leitungen für die IR-LED (siehe Nr. 4) und drei Leitungen für den Hall-Sensor (siehe Nr. 5). Die Führung ist ein Werbegeschenk der Firma Igus.
- IR-LED zum Senden des Stopp-Signal für zu transportierende Fahrzeuge
- Hall-Sensor zur Rückmeldung der Information: Fahrzeug ist sicher und vollständig im Aufzug angekommen. Erst dann wird das Stopp-Signal auf der IR-LED (Nr. 4) gesendet, der Einfahrtservo geschlossen und der Aufzug bewegt sich nach oben.
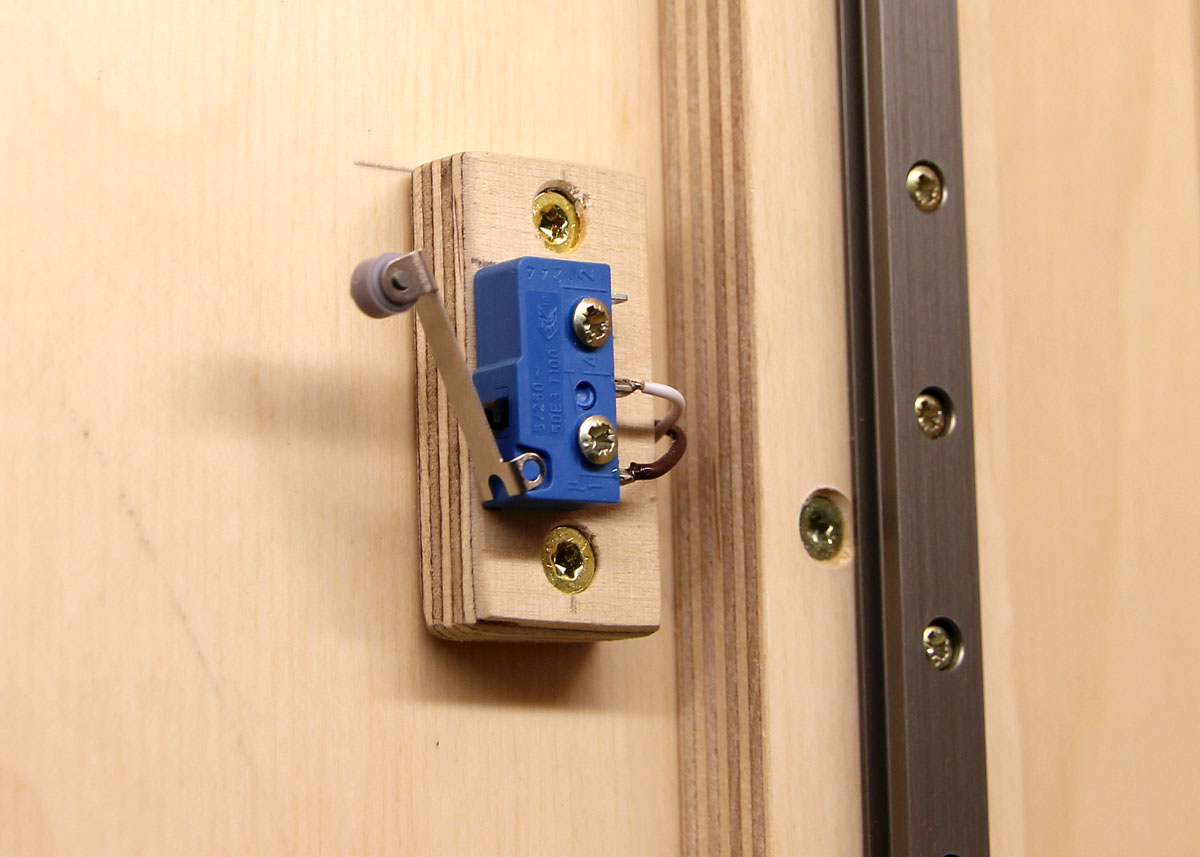
- Positionsschalter zur Rückmeldung, ob der Aufzug bis zum Endlagen-Stopp abgebremst werden soll.
- Einfahrtsicherung mit RC-Modellbau-Servo zur Absturzsicherung, falls sich der Aufzug gerade in der oberen Position befindet.
- IR-LED zum Senden des Stopp-Signal für an der Einfahrt wartende Fahrzeuge. Darüber hinaus befindet sich hier auch der Hall-Sensor zur Erkennung eines einfahrenden Fahrzeugs. Löst der Sensor aus wird unmittelbar danach das Stopp-Signal ausgesendet um nachfolgende Fahrzeug anzuhalten.
- Die selbst entwickelte Steuerelektronik mit Mikrocontroller.
- Endlagenschalter oben und unten, damit der Aufzug immer passend hält, damit Fahrzeuge ohne hoppeln ein- und ausfahren können. Die Schalter können nach dem Lösen der Schrauben nach oben und unten nachjustiert werden.
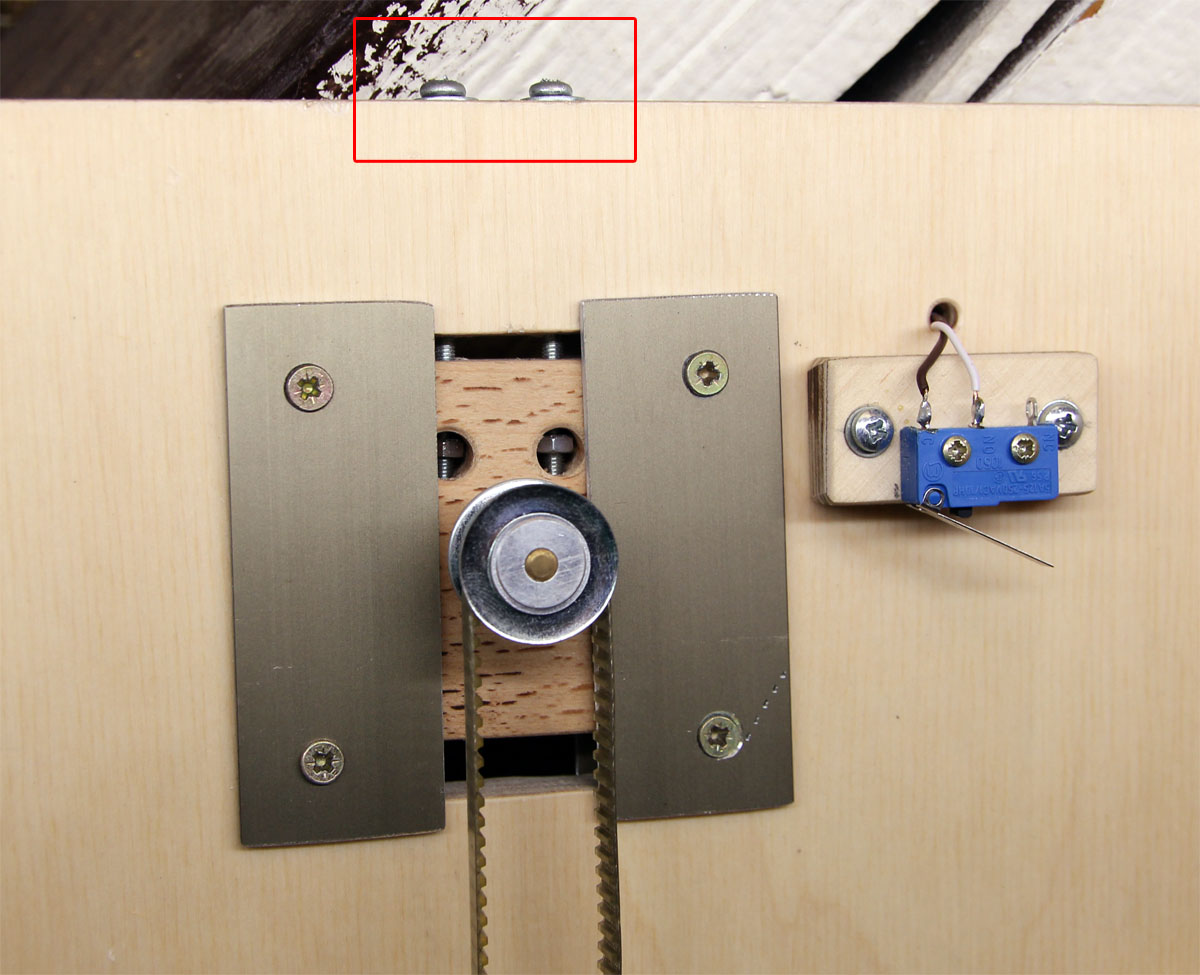
- Mechanik zur Justierung und zum Nachspannen des Antriebsriemen. Über zwei oben eingelassene Schrauben kann die Spannung variabel verstellt werden.

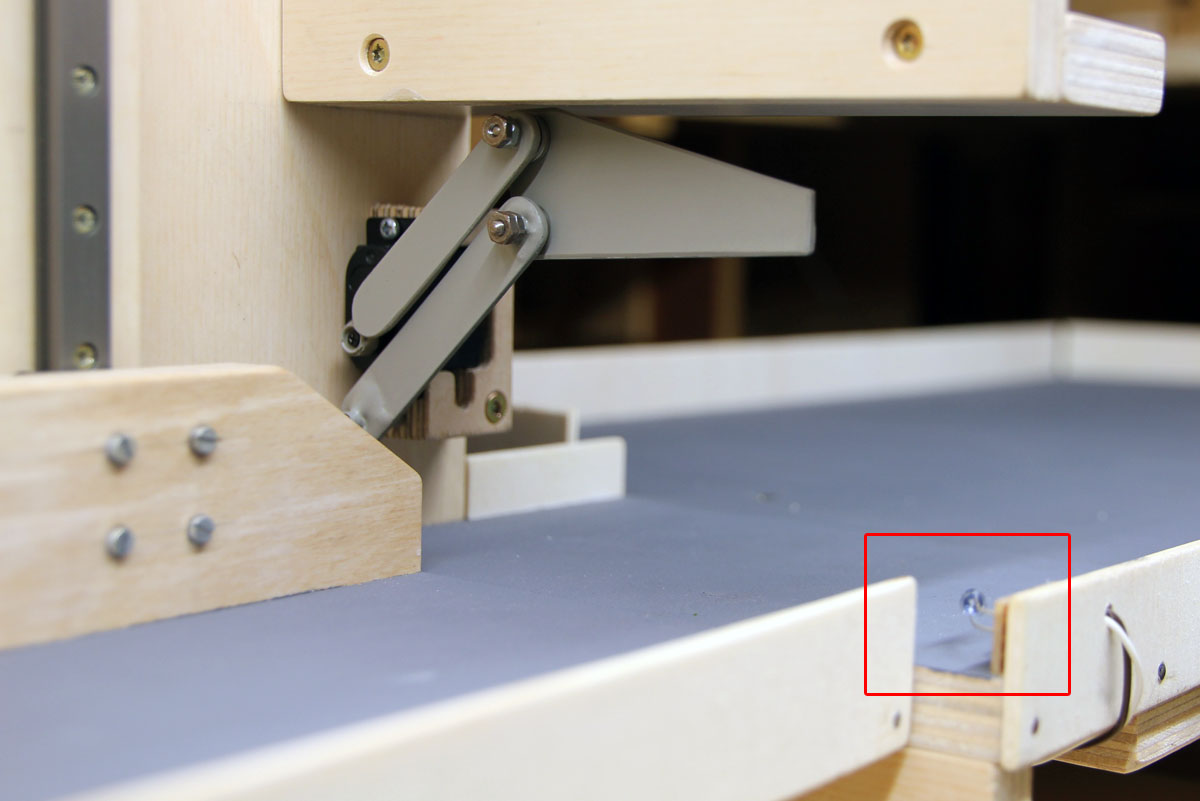
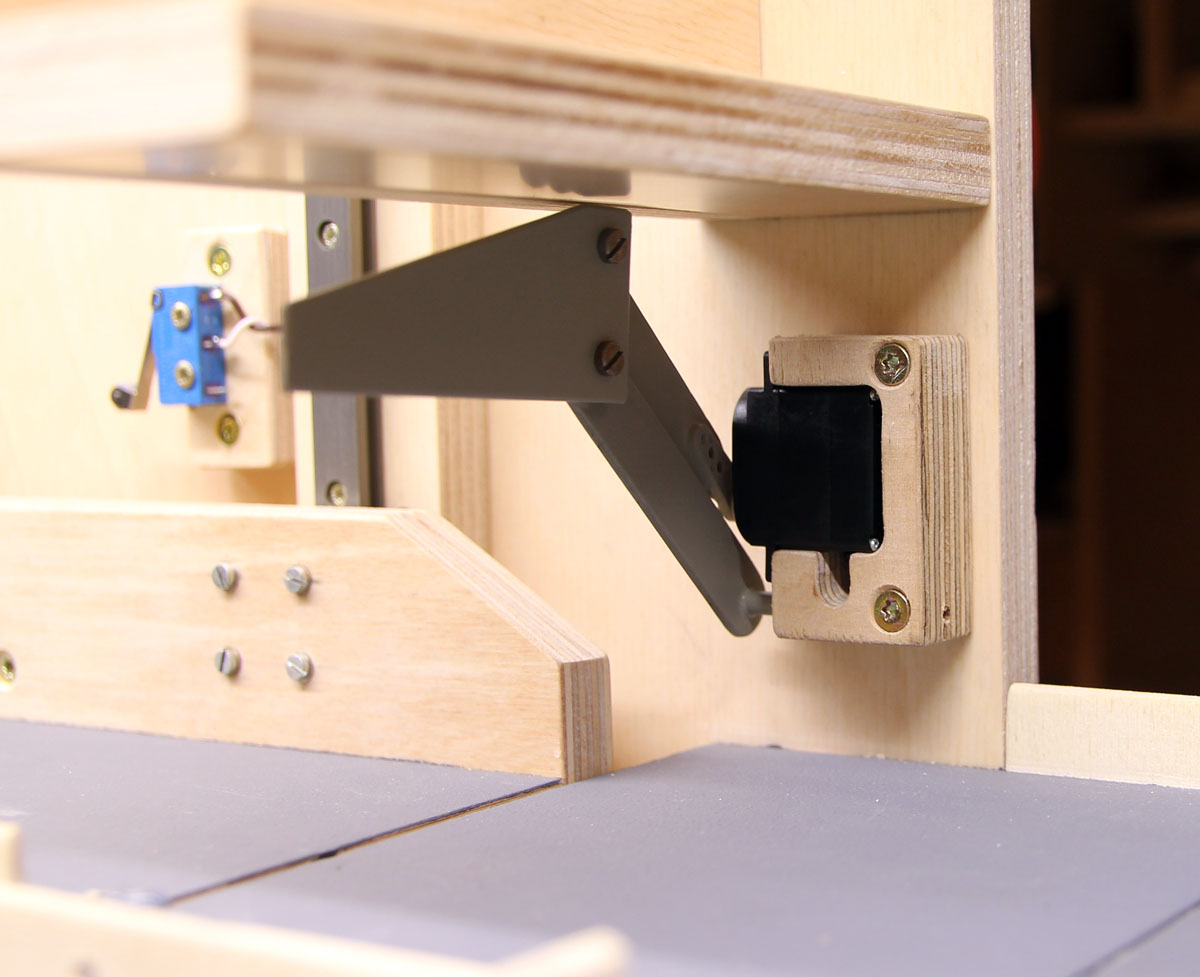
Wegen der engen Platzverhältnisse gab es eine Spezialkonstruktion für die Einfahrtschranke mittels RC-Modellbau-Servo und der Arme aus alten Platinen- sowie Polystyrolstücken.
Auch auf dem beweglichen Aufzugteil befinden sich diverse Teile:
- Oben ist der Positionsschalter zum Abbremsen zu sehen – dieser kann nach dem Lösen der Schrauben nachjustiert werden. Im unteren Teil der markierten Box sieht man den rund geschliffenen Holzklotz, welcher die Endlagen- und Positionsschalter betätigt. Der Klotz ist deswegen rund geschliffen, da dann die Positionsschalter mit den Rollen darüber gleiten können und es nicht verkannten kann.
- Eine Seite des Antriebsriemen muss am Aufzug befestigt sein. Dieses Spezialteil ist aus Polystyrolstreifen hergestellt worden. Der Riemen kann sich nach vorne und hinten frei bewegen, jedoch nicht nach oben und unten. Tolleranzen bei nicht exakt parallel laufenden Antriebsrädern werden so ausgeglichen.
- Halterung für das Kabel-Schleppsystem mit Ausfädelung.
- Schlitten der Linearführung samt Befestigungsschrauben.
- IR-LED zum Senden des Stopp-Signal auf dem Aufzug beim Transport.

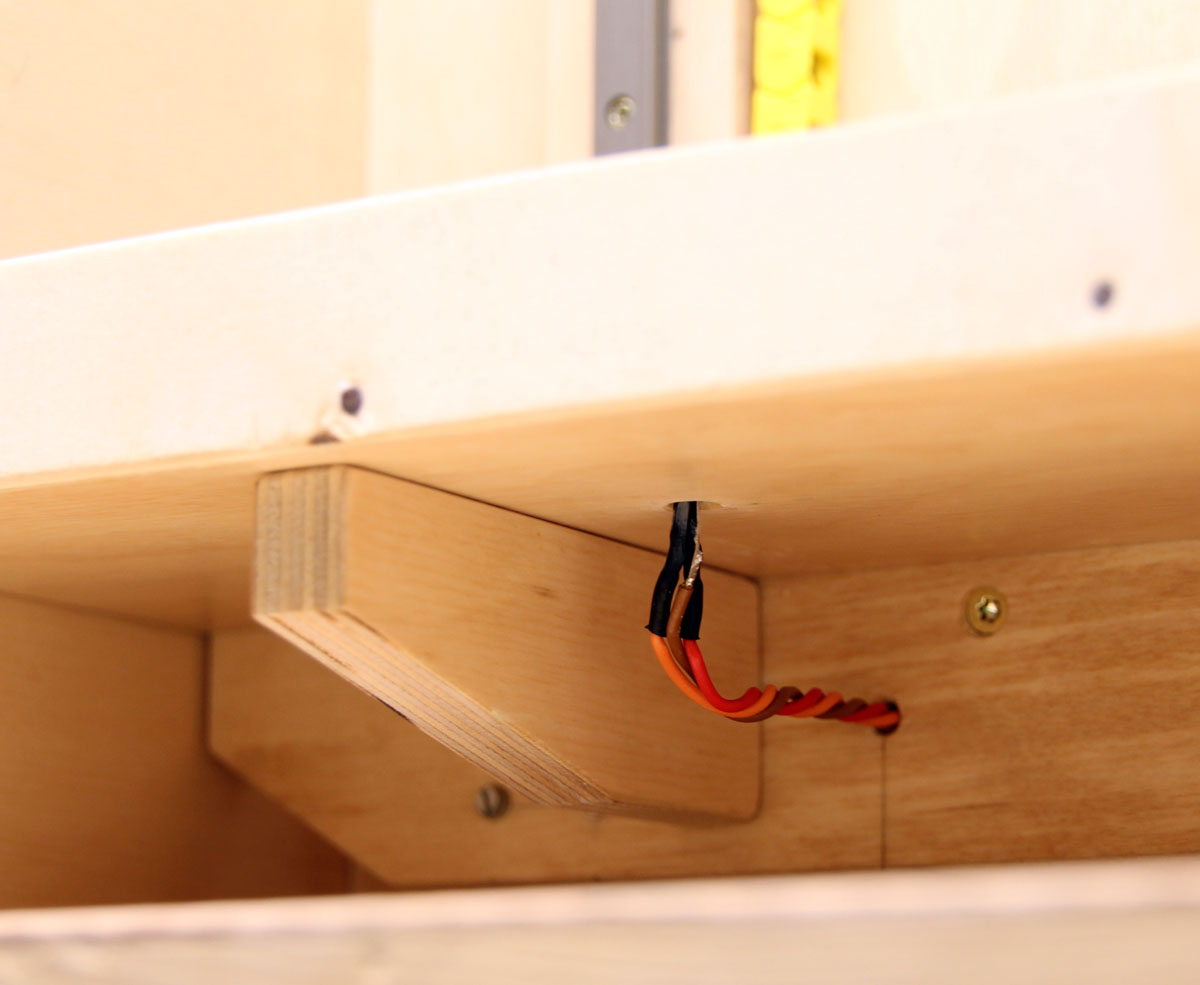
Detailaufnahme der Ausführung des Hall-Sensor Kabels. Die Kontakte sind sauber via Schrumpfschlauch voneinander getrennt.
Ein weiterer Blick auf das Kabel-Schleppsystem sowie dessen Befestigung.

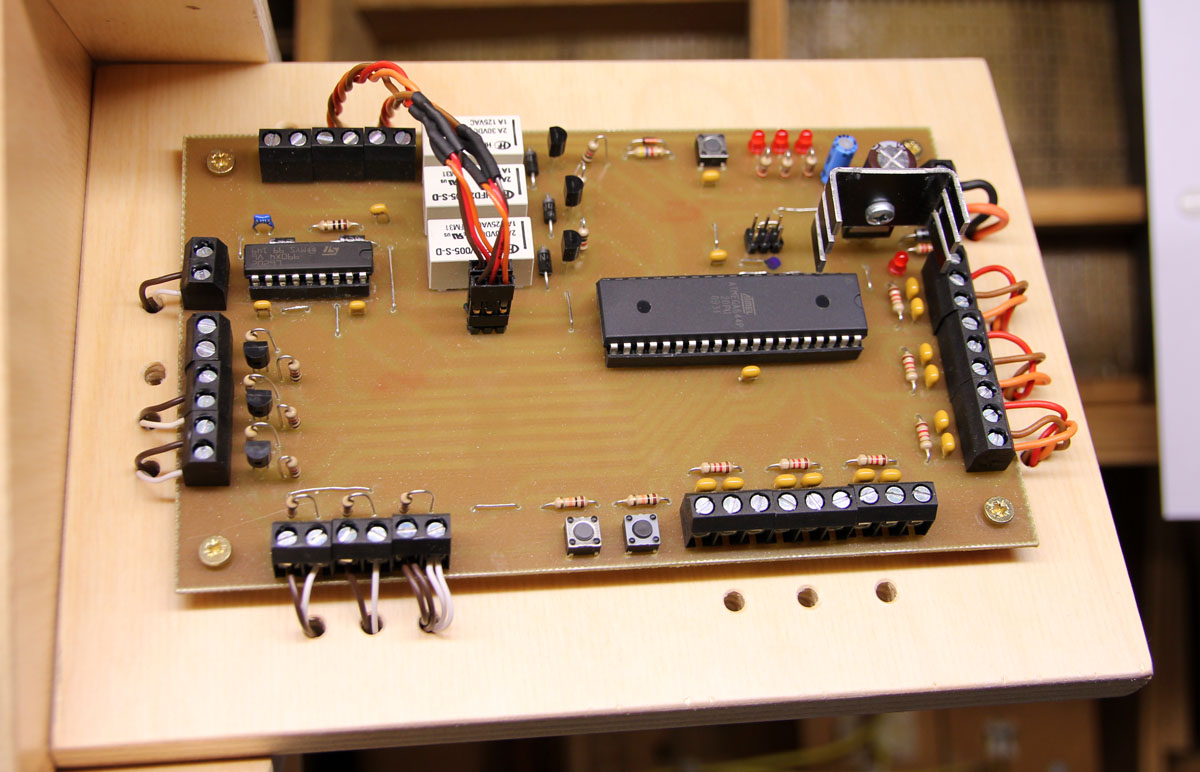
Selbst entwickelte Steuerung mit Mikrocontroller ATmega644 der Firma Atmel. Diese wird aktuell nur für die Fahrt von unten-nach-oben verwendet, kann aber auch von oben-nach-unten genutzt werden. Lediglich die Software müsste hierfür angepasst werden (siehe unbelegte Anschlussklemmen).
Die IR-LED sind primitiv auf eine kleine Lochrasterplatine gelötet worden. Diese selbst wurde mit Heißkleb am Aufzug befestigt. Die LED kann dadurch noch nach beliebigen ausgerichtet werden.

Die obere Ausfahrtschranke und Absturzssicherung wurde mit einem einfachen RC-Modellbau-Servo umgesetzt, welcher einen verlängerten Dorn erhalten hat.

Über die markierten Schrauben wird die Spannung des Riemen neu eingestellt.
Positionsschalter in der Detailaufnahme.
Einfahrtsicherung in größerer Darstellung. Gut zu sehen ist die Mechanik, welche der eines Parallelogramm nachempfunden ist. Rot markiert ist die IR-LED für die Einfahrt.