Dieses eher etwas kleiner Projekt löst ein Problem, welches bei der Umrüstung eines alten Faller-Car Fahrzeuges auf die DC-Car Dekoder von Claus Ilchmann auftrat. Die Firma Faller hat nämlich früher in Ihre Faller-Car Fahrzeuge die guten und teuren Faulhaber Motoren verbaut. Diese machen aber in Verbindung mit den DC-Car Dekodern oft Probleme, da die Motoren nicht abrupt stoppen, sondern noch sehr lange ausrollen. Das führt dazu, dass die Fahrzeuge Stoppstellen einfach überfahren.
Dieses Problem kann nur durch den Tausch des Getriebe behoben werden – was sehr teuer ist – oder man rüstet eine eigene Motorbremse nach. Da diese vom DC-Car Team nicht angeboten wird, habe ich mich an die Arbeit gemacht und eine eigene entwickelt. Wer mehr erfahren möchte: weiter unten im Artikel wird das Funktionsprinzip technisch beschrieben.
Hinweis:
Die Abstandssteuerung bleibt von dieser Ergänzung völlig unberührt. Der Baustein greift nur bei einem vollständigen Stopp ein z.B. Infrarot-Stoppstelle!
Nachfolgend ein paar Bilder des kleinen Bausteins:
Eigens gefräste Platine für die Bauteile – ausgesägt in echt lediglich 6,3mm x 5,6mm groß
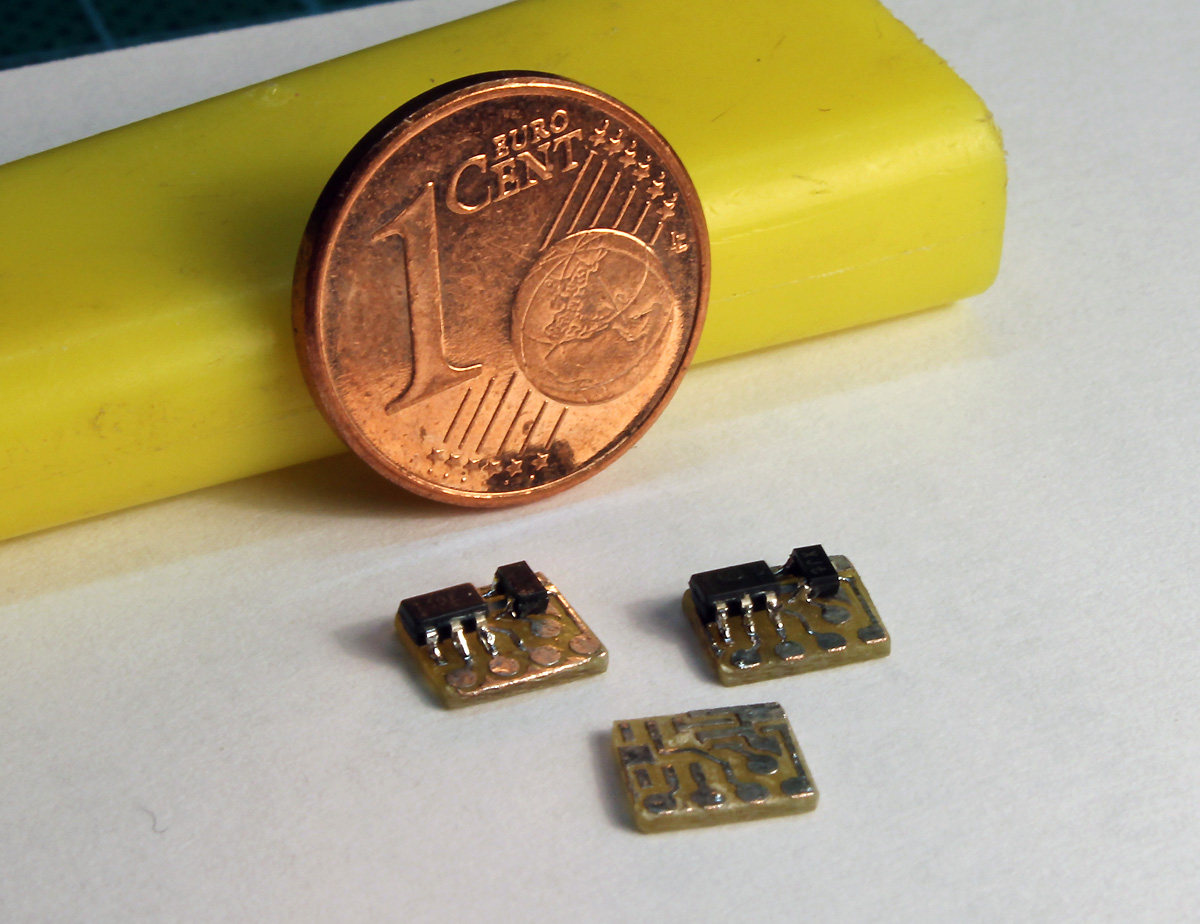
Bestückte und unbestückte Platinen – ein 1-Cent Stück zum Größenvergleich
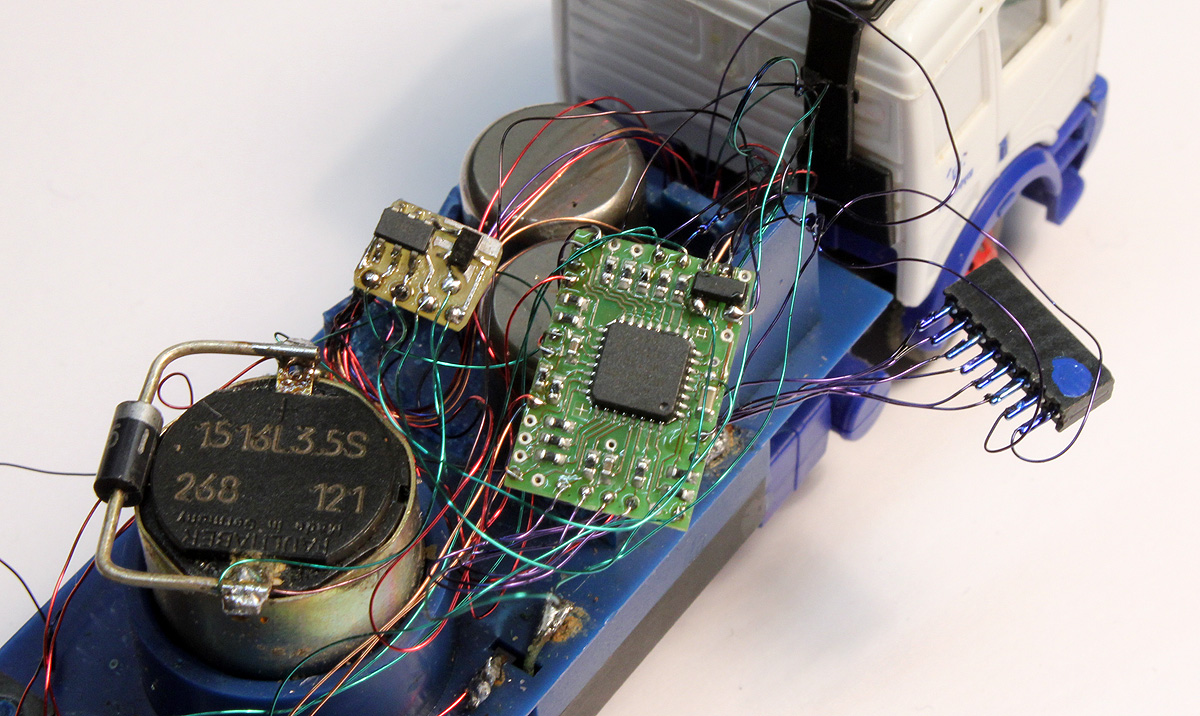
Aktive Motorbremse im eingebauten Zustand
Interesse?
Für private Zwecke biete ich den kleinen Baustein zu jeweils 10 Euro zzgl. Versandkosten an. Sende hierzu bitte eine E-Mail an mich mit gewünschter Stückzahl und Adresse. Ich melde mich dann umgehend. Meine E-Mail Adresse findet man hier: Kontakt.
Funktionsprinzip
Diese Beschreibung ist absichtlich sehr technisch und kurz gehalten, da eine ausführliche Beschreibung für den Laien den Umfang dieses Artikels sprengen würde.
Der hier steuernde ATtiny10 hat im Grunde genommen einen Eingang und einen Ausgang:
- Eingang
Hier wird das PWM-Ausgangssignal des DC-Car Dekoders periodisch abgefragt, um zu überprüfen, ob noch Spannung auf den Motor gegeben wird. Hat die PWM in einem Interval (ca. 8 Millisekunden) keinen Pegelwechsel mehr vollzogen kann dies in zwei Fällen auftreten: 1. der Motor wird dauerhaft bestromt für Vollgas oder 2. er ist komplett aus. Genau dieser Zustand wird vom Mikrocontroller erfasst und danach kurz der Ausgang aktiviert… - Ausgang
Der Ausgang steuert einen MOSFET an, welcher die Anschlüsse des Motors für eine kurze Zeit (ca. 200 Millisekunden) überbrückt. Dies bewirkt, dass die vom Motor induzierte Spannung beim Ausrollen wieder zu sich selbst zurück geführt wird. In der Folge bleibt der Motor ruckartig stehen – so wie man das von den klassischen Faller-Car Reedkontakten her kennt. Der MOSFET wird im Anschluss wieder deaktiviert, damit das Spiel von vorn beginnen kann.
Anschlussbeschreibung
Anschlüsse an der aktiven Motorbremse:
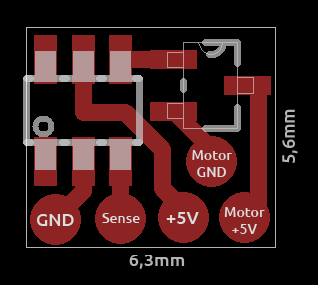
- GND
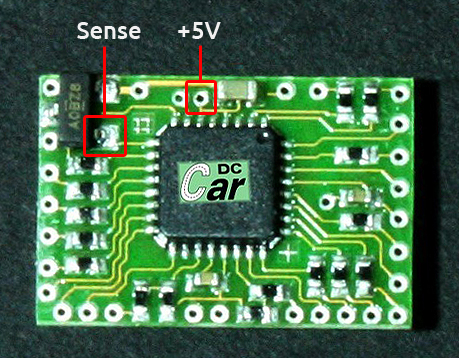
Minus vom Akku - Sense
Eingang (Gate) vom MOSFET des DC-Car Dekoders für die Motoransteuerung (NICHT der Anschluss vom Motor – siehe unten) - +5V
+-Pol der Spannungsversorgung vom DC-Car Dekoder (NICHT die Akkuspannung – siehe unten) - Motor GND
Masseanschluss des Motors - Motor +5V
+-Pol Anschluss des Motors
Und analog hierzu die benötigten Anschlüsse am DC-Car Dekoder:
Bildquelle für DC05 Dekoder: Lampen-König